2024. 7. 21. 15:37ㆍ충남 인력개발원



MODULE MainModule
CONST robtarget p10:=[[-9.62,-459.24,16.56],[0.00128106,-0.0686242,-0.997621,0.00648762],[-2,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p20:=[[451.19,-437.62,454.15],[0.00131833,-0.0685305,-0.997627,0.00646952],[-1,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p30:=[[609.77,-441.42,351.66],[0.00131783,-0.0685027,-0.997629,0.00645476],[-1,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
PROC main()
AccSet 1, 1;
WHILE TRUE DO
put_ma;
WaitTime 2;
ENDWHILE
ENDPROC
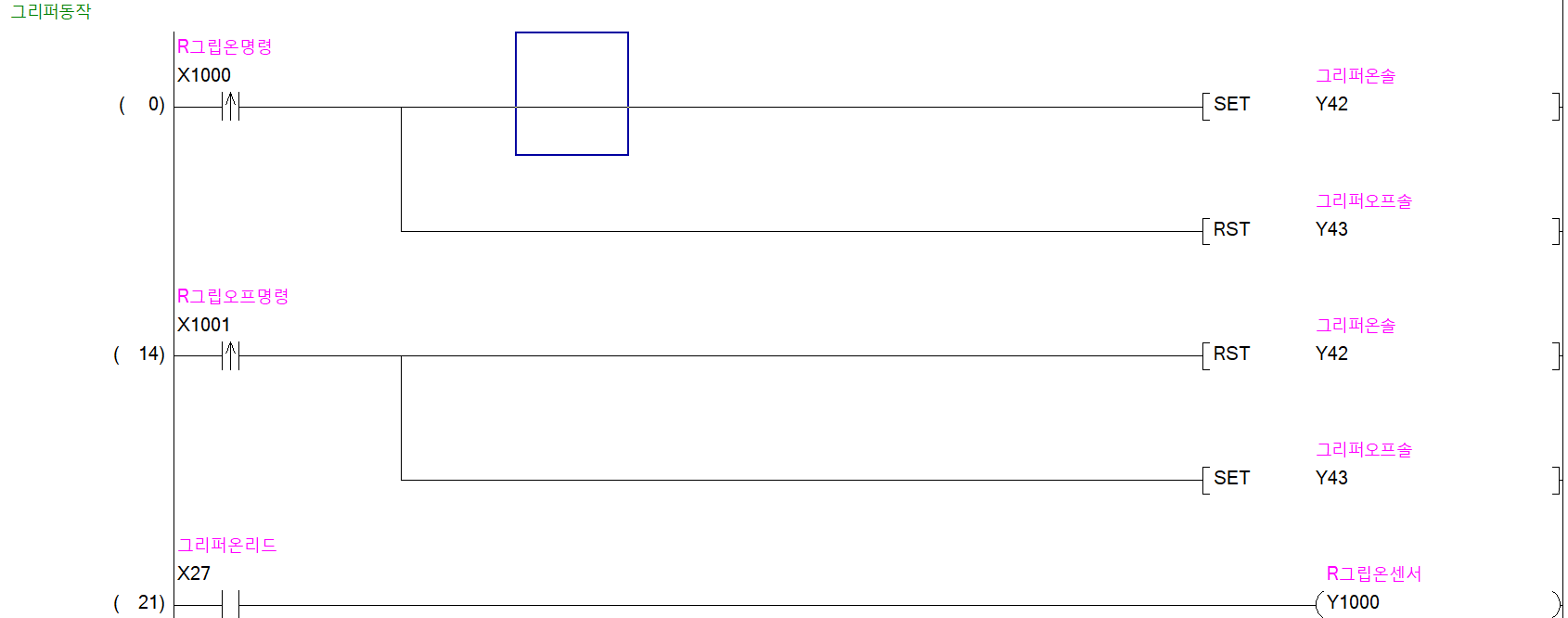
PROC gripon()
PulseDO\PLength:=0.2, do00;
WaitDI di00_griponsen, 1;
ENDPROC
PROC gripoff()
PulseDO\PLength:=0.2, do01;
WaitDI di01_gripoffsen, 1;
ENDPROC
PROC put_ma()
VAR num x_pos:=0;
VAR num y_pos:=0;
FOR CT1 FROM 1 TO 2 DO
FOR CT FROM 1 TO 3 DO
MoveJ Offs(p10,x_pos,y_pos,50), v200, z20, tool_khj;
MoveL Offs(p10,x_pos,y_pos,0), v20, fine, tool_khj;
gripon;
MoveL Offs(p10,x_pos,y_pos,50), v100, z20, tool_khj;
MoveJ p20, v200, z40, tool_khj;
MoveJ Offs(p30,0,0,50), v200, z20, tool_khj;
MoveL p30, v20, fine, tool_khj;
gripoff;
MoveL Offs(p30,0,0,50), v200, z20, tool_khj;
MoveJ p20, v200, z40, tool_khj;
x_pos := x_pos+110;
ENDFOR
x_pos:=0;
y_poS:=y_pos-110;
ENDFOR
ENDPROC
ENDMODULE해당 환경에 맞춰 짯던 RAPID 언어 코드베이스 입니다.
리뷰
RAPID 코드의 구조와 함수 해석
1. 메인 모듈과 상수 정의
rapid코드 복사
MODULE MainModule
CONST robtarget p10:=[[-9.62,-459.24,16.56],[0.00128106,-0.0686242,-0.997621,0.00648762],[-2,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p20:=[[451.19,-437.62,454.15],[0.00131833,-0.0685305,-0.997627,0.00646952],[-1,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
CONST robtarget p30:=[[609.77,-441.42,351.66],[0.00131783,-0.0685027,-0.997629,0.00645476],[-1,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
이 부분은 RAPID의 MainModule 모듈 내에 상수(로봇의 목표 위치)를 정의합니다. C 언어로 표현하면 전역 상수를 정의하는 것과 비슷합니다.
c코드 복사
// C
#include <stdio.h>#define P10 { {-9.62,-459.24,16.56}, {0.00128106,-0.0686242,-0.997621,0.00648762}, {-2,-1,-1,0}, {9E+09,9E+09,9E+09,9E+09,9E+09,9E+09} }
#define P20 { {451.19,-437.62,454.15}, {0.00131833,-0.0685305,-0.997627,0.00646952}, {-1,-1,-1,0}, {9E+09,9E+09,9E+09,9E+09,9E+09,9E+09} }
#define P30 { {609.77,-441.42,351.66}, {0.00131783,-0.0685027,-0.997629,0.00645476}, {-1,-1,-1,0}, {9E+09,9E+09,9E+09,9E+09,9E+09,9E+09} }
2. 메인 프로시저
rapid코드 복사
PROC main()
AccSet 1, 1;
WHILE TRUE DO
put_ma;
WaitTime 2;
ENDWHILE
ENDPROC
main 프로시저는 프로그램의 진입점입니다. 가속도를 설정하고, put_ma 프로시저를 반복적으로 호출하며 2초 대기합니다. C 언어에서는 다음과 같이 표현할 수 있습니다.
c코드 복사
// C
#include <unistd.h> // for sleep functionvoid put_ma();
int main() {
// 가속도 설정 생략 (필요한 경우 다른 방법으로 설정)
while (1) {
put_ma();
sleep(2); // 2초 대기
}
return 0;
}
3. 그리퍼 제어 프로시저
rapid코드 복사
PROC gripon()
PulseDO\\PLength:=0.2, do00;
WaitDI di00_griponsen, 1;
ENDPROC
PROC gripoff()
PulseDO\\PLength:=0.2, do01;
WaitDI di01_gripoffsen, 1;
ENDPROC
**gripon**과 gripoff 프로시저는 그리퍼를 여닫는 기능을 합니다. C 언어에서는 다음과 같이 유사한 기능을 수행할 수 있습니다.
c코드 복사
// C
#include <stdio.h>void gripon() {
// 가상의 디지털 출력 제어 함수 (실제로는 하드웨어 API 사용)
PulseDO(0.2, 0); // do00
WaitDI(0); // di00_griponsen
}
void gripoff() {
// 가상의 디지털 출력 제어 함수 (실제로는 하드웨어 API 사용)
PulseDO(0.2, 1); // do01
WaitDI(1); // di01_gripoffsen
}
// 가상의 함수들 (실제로는 하드웨어 API 사용)
void PulseDO(double length, int doPin) {
// 구현 생략
}
void WaitDI(int diPin) {
// 구현 생략
}
4. 작업 수행 프로시저
rapid코드 복사
PROC put_ma()
FOR CT1 FROM 1 TO 2 DO
VAR num x_pos := 0;
VAR num y_pos := 0;
FOR CT FROM 1 TO 3 DO
MoveJ Offs(p10, x_pos, y_pos, 50), v200, z20, tool_khj;
MoveL Offs(p10, x_pos, y_pos, 0), v20, fine, tool_khj;
gripon;
MoveL Offs(p10, x_pos, y_pos, 50), v100, z20, tool_khj;
MoveJ p20, v200, z40, tool_khj;
MoveJ Offs(p30, 0, 0, 50), v200, z20, tool_khj;
MoveL p30, v20, fine, tool_khj;
gripoff;
MoveL Offs(p30, 0, 0, 50), v200, z20, tool_khj;
MoveJ p20, v200, z40, tool_khj;
x_pos := x_pos + 110;
ENDFOR
x_pos := 0;
y_pos := y_pos - 110;
ENDFOR
ENDPROC
put_ma 프로시저는 로봇의 작업을 수행하는 함수입니다. 여러 위치로 이동하면서 작업을 수행하고, 그리퍼를 여닫습니다. C 언어로 유사한 로직을 표현하면 다음과 같습니다.
c코드 복사
// C
#include <stdio.h>// 가상의 이동 함수들 (실제로는 로봇 API 사용)
void MoveJ(double pos[4], int speed, int zone, char *tool);
void MoveL(double pos[4], int speed, int zone, char *tool);
double* Offs(double pos[4], double x_off, double y_off, double z_off);
void put_ma() {
double p10[4] = P10;
double p20[4] = P20;
double p30[4] = P30;
int CT1, CT;
double x_pos = 0;
double y_pos = 0;
for (CT1 = 1; CT1 <= 2; CT1++) {
for (CT = 1; CT <= 3; CT++) {
MoveJ(Offs(p10, x_pos, y_pos, 50), 200, 20, "tool_khj");
MoveL(Offs(p10, x_pos, y_pos, 0), 20, 1, "tool_khj");
gripon();
MoveL(Offs(p10, x_pos, y_pos, 50), 100, 20, "tool_khj");
MoveJ(p20, 200, 40, "tool_khj");
MoveJ(Offs(p30, 0, 0, 50), 200, 20, "tool_khj");
MoveL(p30, 20, 1, "tool_khj");
gripoff();
MoveL(Offs(p30, 0, 0, 50), 200, 20, "tool_khj");
MoveJ(p20, 200, 40, "tool_khj");
x_pos += 110;
}
x_pos = 0;
y_pos -= 110;
}
}
// 가상의 함수들 (실제로는 로봇 API 사용)
void MoveJ(double pos[4], int speed, int zone, char *tool) {
// 구현 생략
}
void MoveL(double pos[4], int speed, int zone, char *tool) {
// 구현 생략
}
double* Offs(double pos[4], double x_off, double y_off, double z_off) {
// 위치 오프셋 계산 및 반환
static double new_pos[4];
new_pos[0] = pos[0] + x_off;
new_pos[1] = pos[1] + y_off;
new_pos[2] = pos[2] + z_off;
new_pos[3] = pos[3];
return new_pos;
}
전반적인 해석
- 프로시저(함수): RAPID의 **PROC**는 C의 void 함수와 유사합니다. 둘 다 특정 작업을 수행하는 명령어 집합입니다.
- 변수 선언 및 초기화: RAPID의 변수 선언은 VAR 키워드를 사용하며, 이는 C의 로컬 변수 선언과 유사합니다.
- 루프: RAPID의 FOR 문과 WHILE 문은 C의 for 문과 while 문과 매우 유사합니다.
- 로봇 제어 명령어: MoveJ, MoveL, PulseDO, WaitDI 등은 로봇 제어를 위한 특정 명령어입니다. 이는 하드웨어 제어 API를 호출하는 C 코드와 비슷합니다.
Q1: RAPID와 C 언어에서 반복문을 사용하는 다양한 방법과 그 차이점에 대해 설명해 줄 수 있나요?
RAPID
RAPID에서 반복문은 FOR, WHILE, REPEAT 등의 구조를 사용하여 구현됩니다.
- FOR 문:
- rapid코드 복사 FOR i FROM 1 TO 10 DO Write i; ENDFOR
- WHILE 문:
- rapid코드 복사 VAR num i := 1; WHILE i <= 10 DO Write i; i := i + 1; ENDWHILE
- REPEAT 문:
- rapid코드 복사 VAR num i := 1; REPEAT Write i; i := i + 1; UNTIL i > 10;
C
C 언어에서 반복문은 for, while, do-while 등의 구조를 사용하여 구현됩니다.
- for 문:
- c코드 복사 for (int i = 1; i <= 10; i++) { printf("%d\\n", i); }
- while 문:
- c코드 복사 int i = 1; while (i <= 10) { printf("%d\\n", i); i++; }
- do-while 문:
- c코드 복사 int i = 1; do { printf("%d\\n", i); i++; } while (i <= 10);
차이점
- 구조적 차이:
- RAPID의 반복문은 기본적으로 ENDFOR, ENDWHILE, **UNTIL**과 같은 종료 구문을 사용합니다.
- C 언어는 중괄호 **{}**를 사용하여 반복문의 범위를 정의합니다.
- 언어 특성:
- RAPID는 로봇 제어에 특화된 명령어가 많아, 반복문에서 로봇의 움직임을 쉽게 통합할 수 있습니다.
- C 언어는 일반적인 프로그래밍 언어로, 다양한 응용 프로그램에서 반복문을 사용합니다.
Q2: RAPID의 robtarget과 C의 배열을 사용할 때 주의해야 할 점은 무엇인가요?
RAPID
RAPID의 **robtarget**은 로봇의 목표 위치를 나타내는 데이터 구조입니다. 각 요소는 좌표, 쿼터니언, 외부 축, 구성을 포함합니다.
- 정의와 사용:
- rapid코드 복사 CONST robtarget p10 := [[-9.62, -459.24, 16.56], [0.00128106, -0.0686242, -0.997621, 0.00648762], [-2, -1, -1, 0], [9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09]];
C
C 언어의 배열은 단순한 데이터 집합으로, 동일한 데이터 타입의 요소들이 연속적으로 저장됩니다.
- 정의와 사용:
- c코드 복사 double p10[4][3] = { {-9.62, -459.24, 16.56}, {0.00128106, -0.0686242, -0.997621, 0.00648762}, {-2, -1, -1, 0}, {9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09} };
주의할 점
- RAPID:
- **robtarget**은 로봇의 동작에 필수적인 다양한 정보를 포함하므로, 올바르게 설정되어야 합니다.
- 좌표계와 로봇의 동작 방식에 맞춰 정확한 값을 사용해야 합니다.
- C:
- 배열은 메모리 할당과 접근에 주의해야 합니다.
- 다차원 배열의 경우, 인덱스를 정확히 사용해야 합니다.
- 배열의 크기와 메모리 경계를 넘어 접근하지 않도록 주의해야 합니다.
Q3: 로봇 제어 프로그램에서 하드웨어 인터페이스를 처리하는 방법에 대해 RAPID와 C 언어의 차이점을 설명해 주세요.
RAPID
RAPID는 로봇 제어를 위해 설계된 언어로, 하드웨어 인터페이스를 직접 제어하는 명령어가 많이 포함되어 있습니다.
- 디지털 출력 제어:
- rapid코드 복사 PulseDO\\PLength:=0.2, do00; WaitDI di00_griponsen, 1;
- 로봇 동작 제어:
- rapid코드 복사 MoveJ p10, v200, z20, tool_khj;
C
C 언어는 범용 프로그래밍 언어로, 하드웨어 인터페이스를 제어하기 위해 하드웨어 API나 라이브러리를 사용합니다.
- 디지털 출력 제어:
- c코드 복사 void setDigitalOutput(int pin, int value) { // 하드웨어 제어 라이브러리를 사용 } void pulseDO(int pin, double length) { setDigitalOutput(pin, 1); usleep(length * 1000000); // 길이를 초로 변환 setDigitalOutput(pin, 0); }
- 로봇 동작 제어:
- c코드 복사 void moveJ(double pos[4], int speed, int zone, char *tool) { // 로봇 제어 라이브러리 사용 }
차이점
- 언어 특성:
- RAPID는 로봇 제어를 위해 특화된 명령어들이 내장되어 있어, 코드가 더 간결하고 명확합니다.
- C 언어는 하드웨어 제어를 위해 외부 라이브러리나 API를 사용해야 하므로, 코드가 복잡해질 수 있습니다.
- 제어 수준:
- RAPID는 로봇 컨트롤러와 직접 통합되어, 하드웨어와의 상호 작용이 원활합니다.
- C 언어는 범용적이기 때문에, 특정 하드웨어 제어를 위해서는 하드웨어에 맞는 드라이버나 라이브러리가 필요합니다.
이와 같은 차이점을 이해하고 각 언어의 장단점을 활용하여 로봇 제어 프로그램을 작성하면 효과적입니다.
1. robtarget 타입 설명
robtarget 타입은 로봇의 위치와 방향을 정의하기 위해 사용됩니다. 이 타입은 네 개의 주요 요소로 구성됩니다:
- Position (위치):
- 구성 요소: x, y, z 좌표
- 예시: [-9.62,-459.24,16.56]
- 역할: 로봇의 목표 지점을 3D 공간에서 나타냅니다.
- Quaternion (쿼터니언):
- 구성 요소: q1, q2, q3, q4
- 예시: [0.00128106,-0.0686242,-0.997621,0.00648762]
- 역할: 로봇의 방향을 정의합니다. 쿼터니언은 회전을 표현하는 수학적 방법으로, 회전 행렬보다 계산 효율성이 높고, 기하학적 특성이 뛰어납니다.
- Configuration (로봇의 상태):
- 구성 요소: 여러 개의 정수 값
- 예시: [-2,-1,-1,0]
- 역할: 로봇의 특정 관절 위치나 상태를 설명합니다. 로봇의 각 관절이 특정한 방향으로 설정되었는지를 나타낼 수 있습니다.
- External Axes (외부 축):
- 구성 요소: 여러 개의 실수 값
- 예시: [9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]
- 역할: 로봇이 외부 축을 사용할 때 해당 축의 정보를 정의합니다. 외부 축은 로봇의 기본 축 외에 추가적인 모터나 회전 장치를 의미합니다.
2. C 언어의 구조체 설명
C 언어에서 구조체는 여러 다른 데이터 타입을 하나의 논리적인 단위로 묶는 방법입니다. 이는 관련된 데이터를 그룹화하고, 개별적인 변수로 관리하는 대신 하나의 단위로 처리할 수 있게 합니다.
- 구조체 정의:
- 문법: struct 키워드를 사용하여 정의
- 예시:
- c코드 복사 struct Robtarget { float position[3]; // x, y, z 좌표 float quaternion[4]; // 쿼터니언 값 int configuration[4]; // 로봇 상태 float external_axes[6]; // 외부 축 정보 };
- 구조체 변수 선언 및 초기화:
- 문법: 구조체 타입과 변수 이름을 사용하여 선언 및 초기화
- 예시:
- c코드 복사 struct Robtarget p10 = { {-9.62, -459.24, 16.56}, {0.00128106, -0.0686242, -0.997621, 0.00648762}, {-2, -1, -1, 0}, {9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09} };
- 구조체 멤버 접근:
- 문법: 점(.) 연산자를 사용하여 구조체 멤버에 접근
- 예시:
- c코드 복사 printf("Position: [%.2f, %.2f, %.2f]\\n", p10.position[0], p10.position[1], p10.position[2]);
3. robtarget과 C 구조체의 비교
공통점
- 데이터 그룹화:
- **robtarget**과 구조체 모두 다양한 데이터 타입을 하나의 논리적 단위로 묶습니다.
- 목적: 관련된 데이터를 한 곳에 모아 관리하고 사용하기 쉽게 합니다.
- 초기화 및 선언:
- 선언과 동시에 초기화가 가능하며, 각 멤버에 개별적으로 접근할 수 있습니다.
차이점
- 사용 목적:
- robtarget: 로봇의 위치와 방향을 정의하는 데 특화되어 있습니다.
- 구조체: 일반적인 데이터 그룹화에 사용되며, 다양한 목적을 위해 정의될 수 있습니다.
- 구성 요소의 의미:
- robtarget: 위치, 방향, 로봇 상태, 외부 축과 같은 로봇 제어에 필요한 구체적인 정보를 포함합니다.
- 구조체: 사용자 정의 타입으로, 다양한 정보(예: 학생 정보, 자동차 스펙 등)를 포함할 수 있습니다.
요약
- robtarget 타입: 로봇의 특정 작업을 정의하고 제어하기 위해 위치와 방향 정보를 포함하는 구조입니다.
- C 언어의 구조체: 서로 다른 데이터 타입을 하나로 묶어 논리적 단위로 관리할 수 있도록 하는 구조입니다.
예시 코드 요약
RAPID 코드
rapid코드 복사
MODULE MainModule
CONST robtarget p10:=[[-9.62,-459.24,16.56],
[0.00128106,-0.0686242,-0.997621,0.00648762],
[-2,-1,-1,0],
[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
ENDMODULE
C 언어 코드
c코드 복사
#include <stdio.h>// 구조체 정의
struct Robtarget {
float position[3];
float quaternion[4];
int configuration[4];
float external_axes[6];
};
int main() {
// 구조체 변수 선언 및 초기화
struct Robtarget p10 = {
{-9.62, -459.24, 16.56},
{0.00128106, -0.0686242, -0.997621, 0.00648762},
{-2, -1, -1, 0},
{9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09}
};
// 구조체 멤버 접근
printf("Position: [%.2f, %.2f, %.2f]\\n", p10.position[0], p10.position[1], p10.position[2]);
printf("Quaternion: [%.8f, %.8f, %.8f, %.8f]\\n", p10.quaternion[0], p10.quaternion[1], p10.quaternion[2], p10.quaternion[3]);
printf("Configuration: [%d, %d, %d, %d]\\n", p10.configuration[0], p10.configuration[1], p10.configuration[2], p10.configuration[3]);
printf("External Axes: [%.2f, %.2f, %.2f, %.2f, %.2f, %.2f]\\n", p10.external_axes[0], p10.external_axes[1], p10.external_axes[2], p10.external_axes[3], p10.external_axes[4], p10.external_axes[5]);
return 0;
}
RAPID와 C 언어의 데이터 타입에는 몇 가지 중요한 차이점이 있습니다. 두 언어는 각각 다른 목적을 가지고 설계되었기 때문에 데이터 타입에도 차이가 발생합니다.
RAPID의 데이터 타입
RAPID는 주로 로봇 제어에 사용되기 때문에, 로봇 제어와 관련된 특수한 데이터 타입을 포함하고 있습니다.
- 기본 데이터 타입:
- num: 실수형 데이터를 저장하는 데 사용됩니다. C의 float 또는 **double**과 유사합니다.
- bool: 논리형 데이터를 저장하는 데 사용됩니다. C의 **int**와 유사하지만, **TRUE**와 FALSE 값만 가집니다.
- string: 문자열을 저장하는 데 사용됩니다. C의 char 배열과 유사합니다.
- 로봇 제어 관련 데이터 타입:
- robtarget: 로봇의 목표 위치와 방향을 정의합니다. 이는 위치, 쿼터니언(회전), 외부 축, 구성 요소로 구성됩니다.
- tooldata: 로봇에 장착된 툴의 데이터를 정의합니다.
- wobjdata: 작업 객체의 데이터를 정의합니다.
- 특수 데이터 타입:
- jointtarget: 로봇의 각 조인트(관절) 값들을 정의합니다.
- speeddata: 로봇의 속도 데이터를 정의합니다.
- zonedata: 로봇의 정지 존 데이터를 정의합니다.
C의 데이터 타입
C 언어는 일반적인 시스템 프로그래밍 언어로, 다양한 데이터 타입을 제공합니다.
- 기본 데이터 타입:
- char: 문자 데이터를 저장하는 데 사용됩니다.
- int: 정수형 데이터를 저장하는 데 사용됩니다.
- float: 실수형 데이터를 저장하는 데 사용됩니다.
- double: 보다 정밀한 실수형 데이터를 저장하는 데 사용됩니다.
- 파생 데이터 타입:
- array: 동일한 데이터 타입의 집합을 정의합니다. 예를 들어, **int arr[10];**는 정수형 배열을 정의합니다.
- pointer: 메모리 주소를 저장하는 데 사용됩니다. 예를 들어, **int *p;**는 정수형 포인터를 정의합니다.
- struct: 사용자 정의 데이터 타입을 정의하는 데 사용됩니다. 예를 들어:
- c코드 복사 struct Point { int x; int y; };
- 열거형 데이터 타입:
- enum: 상수 집합을 정의하는 데 사용됩니다. 예를 들어:
- c코드 복사 enum Color { RED, GREEN, BLUE };
주요 차이점
- 목적과 사용 분야:
- RAPID는 로봇 제어를 목적으로 하여, 로봇의 움직임과 작업을 제어하는 특수 데이터 타입을 포함합니다.
- C 언어는 범용 프로그래밍 언어로, 다양한 시스템 프로그래밍과 응용 프로그램 개발에 사용됩니다.
- 데이터 타입의 범위:
- RAPID는 로봇 제어에 특화된 데이터 타입을 가지고 있으며, 이러한 데이터 타입은 로봇의 위치, 툴, 작업 객체 등을 다루는 데 사용됩니다.
- C 언어는 더 광범위한 범용 데이터 타입을 제공하며, 시스템 자원을 직접적으로 관리할 수 있는 기능을 갖추고 있습니다.
- 메모리 관리:
- RAPID는 로봇 제어 프로그램 내에서 메모리 관리를 크게 신경 쓰지 않도록 설계되었습니다.
- C 언어는 메모리 관리가 중요한 부분이며, 프로그래머가 직접 포인터와 메모리 할당, 해제를 다뤄야 합니다.
이와 같은 차이점을 이해하면 RAPID와 C 언어를 사용하여 각각의 목적에 맞는 효율적인 프로그램을 작성할 수 있습니다.
RAPID와 C 언어에서 사용하는 함수의 선언과 호출 방식에는 몇 가지 중요한 차이점이 있습니다. 두 언어는 각각 다른 목적과 설계 철학을 가지고 있기 때문에 함수 사용 방법에도 차이가 나타납니다.
RAPID의 함수
RAPID에서는 함수 대신 주로 프로시저(PROC)와 함수(FUNC)를 사용합니다. 이들은 로봇 제어와 관련된 작업을 수행하는 데 최적화되어 있습니다.
함수 선언
- PROC: 프로시저는 작업을 수행하고 값을 반환하지 않습니다.
- FUNC: 함수는 작업을 수행하고 값을 반환합니다.
예제:
rapid코드 복사
MODULE MainModule
PROC ExampleProcedure()
! 이곳에 작업을 수행하는 코드를 작성합니다.
ENDPROC
FUNC num ExampleFunction(num a, num b)
! 두 수를 더한 값을 반환합니다.
RETURN a + b;
ENDFUNC
ENDMODULE
함수 호출
- PROC 호출: 단순히 프로시저 이름을 사용하여 호출합니다.
- FUNC 호출: 함수의 반환값을 사용하거나 무시할 수 있습니다.
예제:
rapid코드 복사
PROC main()
ExampleProcedure(); ! 프로시저 호출
VAR num result;
result := ExampleFunction(3, 4); ! 함수 호출
Write result; ! 결과 출력
ENDPROC
C 언어의 함수
C 언어에서는 함수 선언과 정의가 명확히 구분됩니다. 함수는 작업을 수행하고 값을 반환할 수 있습니다.
함수 선언
- 함수 선언: 함수의 반환형, 이름, 매개변수를 정의합니다.
- 함수 정의: 함수의 실제 작업 내용을 작성합니다.
예제:
c코드 복사
#include <stdio.h>// 함수 선언
void exampleProcedure();
int exampleFunction(int a, int b);
// 함수 정의
void exampleProcedure() {
// 이곳에 작업을 수행하는 코드를 작성합니다.
}
int exampleFunction(int a, int b) {
// 두 수를 더한 값을 반환합니다.
return a + b;
}
함수 호출
- 함수 호출: 함수 이름을 사용하여 호출하며, 반환값이 있는 경우 이를 변수에 저장하거나 사용할 수 있습니다.
예제:
c코드 복사
int main() {
exampleProcedure(); // 프로시저 호출
int result = exampleFunction(3, 4); // 함수 호출
printf("%d\\n", result); // 결과 출력
return 0;
}
주요 차이점
- 선언 방식:
- RAPID: 프로시저(PROC)와 함수(FUNC)의 차이가 명확하며, 프로시저는 값을 반환하지 않고 함수는 값을 반환합니다.
- C 언어: 모든 함수는 반환형을 가지며, 필요에 따라 **void**를 사용하여 반환형이 없는 함수를 정의합니다.
- 매개변수와 반환값:
- RAPID: 함수(FUNC)는 반환값을 가질 수 있으며, 프로시저(PROC)는 반환값이 없습니다. 매개변수는 명확하게 타입을 지정합니다.
- C 언어: 함수는 항상 반환형을 가지며, 매개변수와 반환값의 타입을 명확히 지정합니다.
- 호출 방식:
- RAPID: 함수 호출 시 반환값을 변수에 저장하거나 직접 사용할 수 있으며, 프로시저는 단순히 호출하여 실행합니다.
- C 언어: 함수 호출 시 반환값을 변수에 저장하거나 직접 사용할 수 있으며, 반환형이 **void**인 함수는 단순히 호출하여 실행합니다.
- 모듈 구조:
- RAPID: 모듈 내에 프로시저와 함수를 정의하고, 모듈 내부에서 이를 호출합니다.
- C 언어: 함수는 파일 내 어디에서든 정의하고 호출할 수 있으며, 필요에 따라 파일을 나눠 관리합니다.
이와 같은 차이점을 이해하면 RAPID와 C 언어의 함수 사용 방식을 효과적으로 활용할 수 있습니다.
RAPID와 C 언어에서 변수의 스코프(scope)는 변수의 선언 위치에 따라 해당 변수를 사용할 수 있는 범위를 결정하는 중요한 개념입니다. 두 언어의 스코프 규칙은 유사한 점도 있지만, 몇 가지 차이점도 있습니다.
RAPID에서의 변수 스코프
RAPID에서는 변수의 스코프가 명확하게 정의되어 있으며, 주로 모듈 스코프와 프로시저/함수 스코프로 나눌 수 있습니다.
- 모듈 스코프(Module Scope):
- 모듈 내에서 선언된 변수는 해당 모듈 내의 모든 프로시저와 함수에서 접근할 수 있습니다.
- 모듈 스코프의 변수는 모듈의 시작 부분에 선언됩니다.
예제:
rapid코드 복사
MODULE MainModule
VAR num moduleVar := 10; ! 모듈 스코프 변수
PROC ExampleProcedure()
moduleVar := moduleVar + 5; ! 모듈 스코프 변수 접근
Write moduleVar;
ENDPROC
FUNC num ExampleFunction()
RETURN moduleVar; ! 모듈 스코프 변수 접근
ENDFUNC
ENDMODULE
- 로컬 스코프(Local Scope):
- 프로시저나 함수 내에서 선언된 변수는 해당 프로시저나 함수 내부에서만 접근할 수 있습니다.
- 로컬 스코프의 변수는 프로시저나 함수의 시작 부분에 선언됩니다.
예제:
rapid코드 복사
MODULE MainModule
PROC ExampleProcedure()
VAR num localVar := 5; ! 로컬 스코프 변수
localVar := localVar + 5;
Write localVar;
ENDPROC
FUNC num ExampleFunction()
VAR num localVar := 3; ! 로컬 스코프 변수
RETURN localVar;
ENDFUNC
ENDMODULE
C 언어에서의 변수 스코프
C 언어에서는 변수의 스코프가 블록, 함수, 파일, 전역 스코프로 나눌 수 있습니다.
- 블록 스코프(Block Scope):
- 중괄호 **{}**로 둘러싸인 블록 내에서 선언된 변수는 해당 블록 내에서만 접근할 수 있습니다.
- 함수 내부의 블록이나 반복문, 조건문 내부에서 사용됩니다.
예제:
c코드 복사
#include <stdio.h>int main() {
int x = 10; // 함수 스코프 변수
if (x > 5) {
int y = 20; // 블록 스코프 변수
printf("%d\\n", y);
}
// printf("%d\\n", y); // 오류: y는 이 블록에서 접근 불가
return 0;
}
- 함수 스코프(Function Scope):
- 함수 내부에서 선언된 변수는 해당 함수 내에서만 접근할 수 있습니다.
예제:
c코드 복사
#include <stdio.h>void exampleFunction() {
int localVar = 5; // 함수 스코프 변수
printf("%d\\n", localVar);
}
int main() {
exampleFunction();
// printf("%d\\n", localVar); // 오류: localVar는 이 함수에서 접근 불가
return 0;
}
- 파일 스코프(File Scope):
- 파일 내에서 선언된 변수는 해당 파일 내의 모든 함수에서 접근할 수 있습니다. 일반적으로 static 키워드로 선언합니다.
예제:
c코드 복사
#include <stdio.h>static int fileVar = 10; // 파일 스코프 변수
void exampleFunction() {
fileVar += 5;
printf("%d\\n", fileVar);
}
int main() {
exampleFunction();
printf("%d\\n", fileVar);
return 0;
}
- 전역 스코프(Global Scope):
- 함수 외부에서 선언된 변수는 프로그램 전체에서 접근할 수 있습니다.
예제:
c코드 복사
#include <stdio.h>int globalVar = 10; // 전역 스코프 변수
void exampleFunction() {
globalVar += 5;
printf("%d\\n", globalVar);
}
int main() {
exampleFunction();
printf("%d\\n", globalVar);
return 0;
}
주요 차이점
- 모듈 스코프 vs. 파일/전역 스코프:
- RAPID: 모듈 스코프 변수는 해당 모듈 내의 모든 프로시저와 함수에서 접근 가능합니다.
- C 언어: 전역 스코프 변수는 프로그램 전체에서 접근 가능하며, 파일 스코프 변수는 해당 파일 내에서만 접근 가능합니다.
- 로컬 스코프 vs. 블록/함수 스코프:
- RAPID: 로컬 스코프 변수는 프로시저나 함수 내에서만 접근 가능합니다.
- C 언어: 블록 스코프 변수는 해당 블록 내에서만, 함수 스코프 변수는 해당 함수 내에서만 접근 가능합니다.
- 변수 선언 위치:
- RAPID: 변수 선언이 프로시저, 함수 또는 모듈의 시작 부분에 위치합니다.
- C 언어: 변수 선언이 블록, 함수 또는 파일의 시작 부분에 위치할 수 있습니다.
이와 같은 차이점을 이해하면 RAPID와 C 언어에서 변수의 스코프를 적절히 활용하여 프로그램을 작성할 수 있습니다.

RAPID의 **MoveJ**와 MoveL 명령어는 로봇을 제어하는 데 사용되는 중요한 명령어입니다.
각각의 명령어는 로봇의 움직임을 다르게 제어합니다.
C 언어에서 이러한 명령어를 구현하려면 로봇 제어 API나 라이브러리를 사용해야 합니다.
RAPID의 MoveJ와 MoveL 명령어
MoveJ
**MoveJ**는 Joint 이동 명령어입니다. 로봇의 각 관절을 개별적으로 제어하여 목표 위치로 이동시킵니다. 이 방식은 빠르지만, 직선 경로를 보장하지는 않습니다.
예제:
rapid코드 복사
MoveJ p10, v200, z20, tool_khj;
- p10: 목표 위치(robtarget).
- v200: 이동 속도.
- z20: 종료 존 데이터(정지 시 위치 정확도).
- tool_khj: 사용되는 도구 데이터.
MoveL
**MoveL**은 Linear 이동 명령어입니다. 로봇의 툴센터포인트(TCP)가 직선 경로를 따라 목표 위치로 이동합니다. 이동 경로가 직선이기 때문에 더 정밀한 작업에 적합하지만, 속도가 상대적으로 느릴 수 있습니다.
예제:
rapid코드 복사
MoveL p10, v200, fine, tool_khj;
- p10: 목표 위치(robtarget).
- v200: 이동 속도.
- fine: 정밀 정지 데이터.
- tool_khj: 사용되는 도구 데이터.
C 언어에서 구현
C 언어에서 로봇 제어를 구현하려면 특정 로봇의 제어 API나 라이브러리를 사용해야 합니다. 여기서는 가상의 로봇 제어 API를 사용하여 **MoveJ**와 **MoveL**을 구현하는 예를 들어보겠습니다.
가상의 로봇 제어 API
먼저, 가상의 로봇 제어 API를 정의합니다. 실제로는 각 로봇 제조사에서 제공하는 SDK나 API를 사용해야 합니다.
c코드 복사
#include <stdio.h>// 가상의 데이터 구조 정의
typedef struct {
double x, y, z;
double q1, q2, q3, q4;
double externalAxes[6];
int configuration;
} RobTarget;
typedef struct {
int speed;
int zone;
} MoveData;
typedef struct {
char* name;
} ToolData;
// 가상의 로봇 제어 함수 선언
void MoveJ(RobTarget target, MoveData moveData, ToolData tool);
void MoveL(RobTarget target, MoveData moveData, ToolData tool);
MoveJ와 MoveL 함수 구현
이제 **MoveJ**와 MoveL 함수의 구현을 해보겠습니다.
c코드 복사
// 가상의 로봇 제어 함수 구현
void MoveJ(RobTarget target, MoveData moveData, ToolData tool) {
// 실제 로봇 제어 API 호출
printf("MoveJ to (%.2f, %.2f, %.2f) with speed %d and zone %d using tool %s\\n",
target.x, target.y, target.z, moveData.speed, moveData.zone, tool.name);
}
void MoveL(RobTarget target, MoveData moveData, ToolData tool) {
// 실제 로봇 제어 API 호출
printf("MoveL to (%.2f, %.2f, %.2f) with speed %d and zone %d using tool %s\\n",
target.x, target.y, target.z, moveData.speed, moveData.zone, tool.name);
}
main 함수에서 호출
이제 main 함수에서 **MoveJ**와 MoveL 함수를 호출하는 예제를 작성해보겠습니다.
c코드 복사
int main() {
// 목표 위치 정의
RobTarget p10 = { -9.62, -459.24, 16.56, 0.00128106, -0.0686242, -0.997621, 0.00648762, {9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09}, -1 };
MoveData moveDataJ = { 200, 20 };
MoveData moveDataL = { 200, 1 };
ToolData tool = { "tool_khj" };
// MoveJ 호출
MoveJ(p10, moveDataJ, tool);
// MoveL 호출
MoveL(p10, moveDataL, tool);
return 0;
}
요약
- RAPID의 MoveJ: 로봇의 각 관절을 개별적으로 제어하여 목표 위치로 이동.
- RAPID의 MoveL: 로봇의 툴센터포인트(TCP)를 직선 경로를 따라 목표 위치로 이동.
- C 언어에서의 구현:
- 특정 로봇의 제어 API나 라이브러리를 사용하여 **MoveJ**와 MoveL 명령어를 구현.
- 가상의 예제를 통해 **MoveJ**와 **MoveL**의 호출 방식과 사용 방법을 설명.
이와 같은 방법을 통해 RAPID와 C 언어에서 로봇 제어를 위한 이동 명령어를 이해하고 구현할 수 있습니다.
RAPID에서 로봇의 목표 위치를 설정하는 방법은 robtarget 데이터 타입을 사용하는 것입니다. 이 데이터 타입은 로봇의 위치, 방향, 외부 축 상태 및 기타 필요한 정보를 포함합니다. 이를 C 언어에서 구현하려면 유사한 데이터 구조를 설계하고, 로봇 제어 API를 통해 이러한 데이터를 사용하는 방법을 구현해야 합니다.
RAPID에서 로봇의 목표 위치 설정
RAPID에서 로봇의 목표 위치는 robtarget 데이터 타입으로 설정됩니다. **robtarget**은 다음과 같은 구성 요소를 포함합니다:
- 위치(Position): X, Y, Z 좌표.
- 방향(Orientation): 쿼터니언 또는 회전 행렬로 표현.
- 외부 축(External Axes): 추가적인 외부 축 상태.
- 구성(Configuration): 로봇의 구성 상태.
예제:
rapid코드 복사
CONST robtarget p10 := [[-9.62, -459.24, 16.56],
[0.00128106, -0.0686242, -0.997621, 0.00648762],
[-2, -1, -1, 0],
[9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09]];
C에서 로봇의 목표 위치 구현
C 언어에서는 **robtarget**과 유사한 구조체를 정의하여 로봇의 목표 위치를 설정할 수 있습니다. 다음은 이러한 구조체를 정의하고 사용하는 예제입니다.
데이터 구조 정의
- 위치(Position)
- 방향(Orientation)
- 외부 축(External Axes)
- 구성(Configuration)
c코드 복사
#include <stdio.h>// 위치 구조체
typedef struct {
double x;
double y;
double z;
} Position;
// 방향 구조체 (쿼터니언)
typedef struct {
double q1;
double q2;
double q3;
double q4;
} Orientation;
// 외부 축 구조체
typedef struct {
double e1;
double e2;
double e3;
double e4;
double e5;
double e6;
} ExternalAxes;
// 구성 구조체
typedef struct {
int cf1;
int cf4;
int cf6;
int cfx;
} Configuration;
// 로봇 목표 구조체
typedef struct {
Position position;
Orientation orientation;
ExternalAxes externalAxes;
Configuration configuration;
} RobTarget;
목표 위치 설정
RobTarget 구조체를 초기화하고 설정하는 예제입니다.
c코드 복사
int main() {
// 목표 위치 초기화
RobTarget p10 = {
{ -9.62, -459.24, 16.56 }, // Position
{ 0.00128106, -0.0686242, -0.997621, 0.00648762 }, // Orientation
{ 9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09 }, // ExternalAxes
{ -2, -1, -1, 0 } // Configuration
};
// 목표 위치 출력
printf("Position: (%.2f, %.2f, %.2f)\\n", p10.position.x, p10.position.y, p10.position.z);
printf("Orientation: (%.7f, %.7f, %.7f, %.7f)\\n", p10.orientation.q1, p10.orientation.q2, p10.orientation.q3, p10.orientation.q4);
printf("External Axes: (%.0f, %.0f, %.0f, %.0f, %.0f, %.0f)\\n", p10.externalAxes.e1, p10.externalAxes.e2, p10.externalAxes.e3, p10.externalAxes.e4, p10.externalAxes.e5, p10.externalAxes.e6);
printf("Configuration: (%d, %d, %d, %d)\\n", p10.configuration.cf1, p10.configuration.cf4, p10.configuration.cf6, p10.configuration.cfx);
return 0;
}
요약
- RAPID에서의 목표 위치 설정:
- robtarget 데이터 타입을 사용하여 위치, 방향, 외부 축 및 구성을 정의.
- CONST robtarget p10 := [[-9.62, -459.24, 16.56], [0.00128106, -0.0686242, -0.997621, 0.00648762], [-2, -1, -1, 0], [9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09]];
- C 언어에서의 목표 위치 구현:
- 유사한 구조체를 정의하여 로봇의 목표 위치를 설정.
- RobTarget 구조체를 초기화하고, 위치, 방향, 외부 축 및 구성을 포함.
이와 같은 구조를 사용하면 RAPID와 C 언어에서 로봇의 목표 위치를 설정하는 방법을 이해하고 구현할 수 있습니다.
RAPID와 C 언어 모두 조건문(if-else)을 사용하여 조건에 따라 다른 코드 블록을 실행할 수 있습니다. 두 언어에서 조건문의 기본 개념은 유사하지만, 문법과 사용법에서 약간의 차이가 있습니다.
RAPID에서 조건문(if-else)의 사용법
RAPID에서는 IF, ELSEIF, ELSE 키워드를 사용하여 조건문을 작성합니다. 각 조건문 블록은 **ENDIF**로 끝납니다. 조건문 내부에서는 참/거짓 값을 평가하여 해당 블록의 코드를 실행합니다.
예제
rapid코드 복사
MODULE MainModule
VAR num a := 10;
VAR num b := 20;
PROC main()
IF a > b THEN
Write "a is greater than b";
ELSEIF a < b THEN
Write "a is less than b";
ELSE
Write "a is equal to b";
ENDIF
ENDPROC
ENDMODULE
C 언어에서 조건문(if-else)의 사용법
C 언어에서도 if, else if, else 키워드를 사용하여 조건문을 작성합니다. 각 조건문 블록은 중괄호 **{}**로 구분됩니다. 조건문 내부에서는 참/거짓 값을 평가하여 해당 블록의 코드를 실행합니다.
예제
c코드 복사
#include <stdio.h>int main() {
int a = 10;
int b = 20;
if (a > b) {
printf("a is greater than b\\n");
} else if (a < b) {
printf("a is less than b\\n");
} else {
printf("a is equal to b\\n");
}
return 0;
}
비교
- 문법 구조:
- RAPID: 조건문 블록은 THEN, ELSEIF, ELSE 및 **ENDIF**로 구분됩니다.
- C 언어: 조건문 블록은 중괄호 **{}**로 구분됩니다.
- 키워드:
- RAPID: IF, ELSEIF, ELSE, THEN, ENDIF 키워드를 사용합니다.
- C 언어: if, else if, else 키워드를 사용합니다.
- 조건식:
- RAPID: 조건식은 THEN 뒤에 작성되며, 비교 연산자(>, <, =, <>)를 사용합니다.
- C 언어: 조건식은 소괄호 () 안에 작성되며, 비교 연산자(>, <, ==, !=)를 사용합니다.
- 코드 블록:
- RAPID: 각 조건문 블록은 **ENDIF**로 끝납니다.
- C 언어: 각 조건문 블록은 중괄호 **{}**로 시작하고 끝납니다.
- 코드 실행:
- RAPID: 조건이 참이면 해당 블록의 코드를 실행하고, 그렇지 않으면 다음 조건을 평가합니다.
- C 언어: 조건이 참이면 해당 블록의 코드를 실행하고, 그렇지 않으면 다음 조건을 평가합니다.
요약
- RAPID:
- rapid코드 복사 IF condition THEN ! code block ELSEIF condition THEN ! code block ELSE ! code block ENDIF
- C 언어:
- c코드 복사 if (condition) { // code block } else if (condition) { // code block } else { // code block }
RAPID와 C 언어의 조건문 사용법을 비교하면, 문법적인 차이점 외에도 코드 블록을 구분하는 방식과 키워드의 사용에서 차이가 있음을 알 수 있습니다. 이러한 차이점을 이해하면 두 언어에서 조건문을 적절히 작성하고 사용할 수 있습니다.
RAPID와 C 언어에서 배열을 선언하고 초기화하는 방법에는 몇 가지 차이점이 있습니다. 두 언어의 배열 사용법을 비교하면, 문법과 배열의 특성에서 차이가 나타납니다.
RAPID에서 배열(Array)의 선언과 초기화
RAPID에서 배열은 고정 크기의 배열로 선언되며, VAR 또는 CONST 키워드를 사용하여 선언할 수 있습니다. 배열의 요소 타입은 명시적으로 지정해야 합니다.
예제
- 변경 가능한 배열(Variable Array)
- rapid코드 복사 MODULE MainModule VAR num arr[5]; ! 크기가 5인 숫자 배열 선언 PROC main() arr[1] := 10; arr[2] := 20; arr[3] := 30; arr[4] := 40; arr[5] := 50; Write arr[1]; ! 배열의 첫 번째 요소 출력 ENDPROC ENDMODULE
- 상수 배열(Constant Array)
- rapid코드 복사 MODULE MainModule CONST num arr[5] := [10, 20, 30, 40, 50]; ! 초기값이 있는 상수 배열 선언 PROC main() Write arr[1]; ! 배열의 첫 번째 요소 출력 ENDPROC ENDMODULE
C 언어에서 배열(Array)의 선언과 초기화
C 언어에서는 배열을 선언할 때 배열의 크기와 요소 타입을 명시해야 합니다. 배열의 크기는 고정되어 있으며, 초기화할 때 초기값을 제공할 수 있습니다.
예제
- 변경 가능한 배열(Variable Array)
- c코드 복사 #include <stdio.h>int main() { int arr[5]; // 크기가 5인 정수 배열 선언 arr[0] = 10; arr[1] = 20; arr[2] = 30; arr[3] = 40; arr[4] = 50; printf("%d\\n", arr[0]); // 배열의 첫 번째 요소 출력 return 0; }
- 상수 배열(Constant Array)
- c코드 복사 #include <stdio.h>int main() { const int arr[5] = {10, 20, 30, 40, 50}; // 초기값이 있는 상수 배열 선언 printf("%d\\n", arr[0]); // 배열의 첫 번째 요소 출력 return 0; }
주요 차이점
- 배열 선언 키워드:
- RAPID: VAR 또는 CONST 키워드를 사용하여 배열을 선언합니다.
- C 언어: 배열 선언에는 별도의 키워드가 필요 없으며, const 키워드를 사용하여 상수 배열을 선언할 수 있습니다.
- 배열의 인덱스:
- RAPID: 배열의 인덱스는 1부터 시작합니다.
- C 언어: 배열의 인덱스는 0부터 시작합니다.
- 초기화 방법:
- RAPID: 배열 선언 시 초기값을 제공할 수 있으며, 상수 배열의 경우 CONST 키워드를 사용합니다.
- C 언어: 배열 선언 시 중괄호 **{}**를 사용하여 초기값을 제공할 수 있습니다.
- 배열 접근:
- RAPID: 배열의 요소에 접근할 때, 1-based 인덱스를 사용합니다.
- C 언어: 배열의 요소에 접근할 때, 0-based 인덱스를 사용합니다.
요약
- RAPID에서 배열 선언과 초기화:
- rapid코드 복사 VAR num arr[5]; ! 크기가 5인 배열 선언 CONST num arr[5] := [10, 20, 30, 40, 50]; ! 초기값이 있는 상수 배열 선언
- C 언어에서 배열 선언과 초기화:
- c코드 복사 int arr[5]; // 크기가 5인 배열 선언 const int arr[5] = {10, 20, 30, 40, 50}; // 초기값이 있는 상수 배열 선언
이와 같은 차이점을 이해하면 RAPID와 C 언어에서 배열을 적절히 선언하고 초기화할 수 있습니다. 각 언어의 배열 사용법을 숙지하여 프로그램 작성 시 효율적으로 활용할 수 있습니다.
